
Charlotte
|
|
|
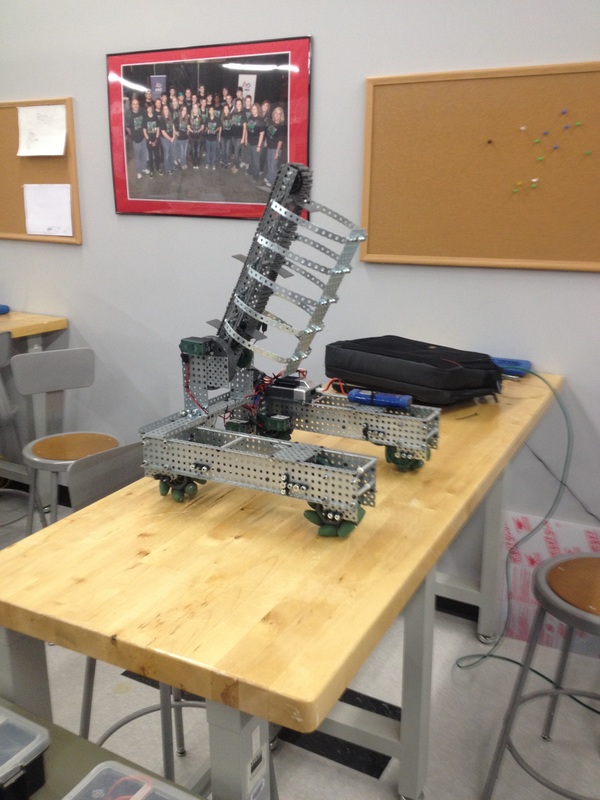
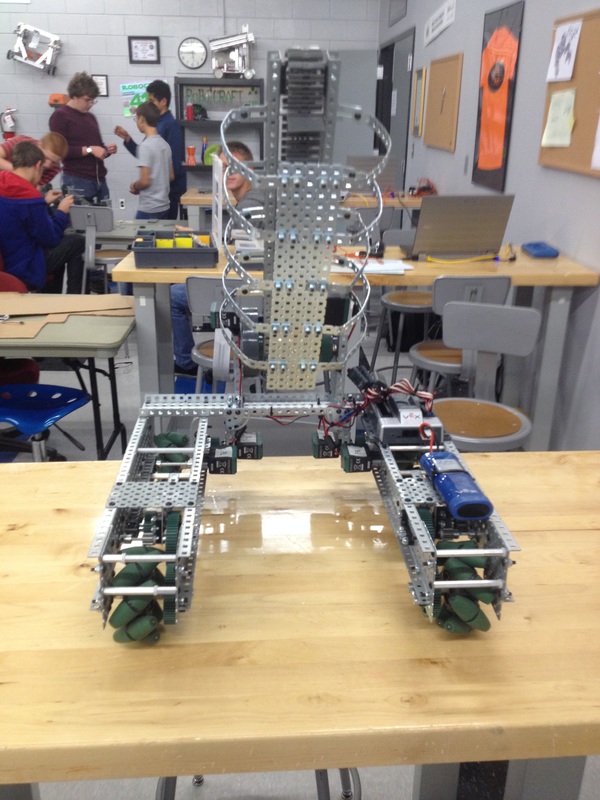
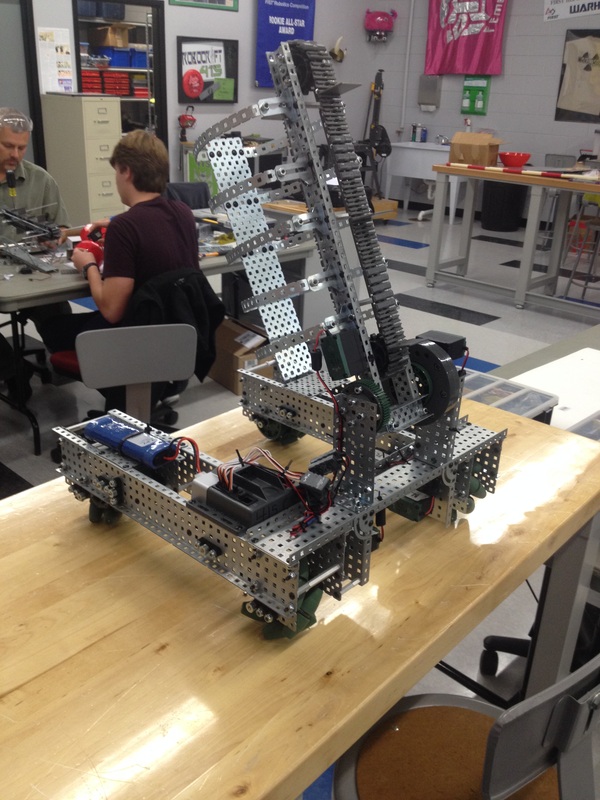
To start off the robot, we decided to focus on stability, weight (so that the arm would not make the robot fall over), and measurement. We used VEX mecanum wheels so that it may move freely across the field; turning, side to side, forwards, and backwards (of course). We also built a chassis so that the wheels would not be damaged. For the pick-up, we have a tube-like design, it has a conveyor belt so that we could easily pick-up and disperse the buckballs. Kristen, the programmer of the team, programmed the motors to reverse the motion of the belt. To score the arm can lift freely so that the robot may be driven towards the tube, hug it, and then lower the arm, reverse direction, and score.